More info
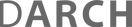
This study presents a novel approach to the physical modelling of the collapse of masonry assemblies, by using force-sensitive robotic arms as flexible testing devices, combined with an optical measuring system. With these robots, applied forces can be applied with controlled position, direction, sense, and magnitude. This allows manipulating and deforming models, while tracking the occurring external and internal forces in real-time.
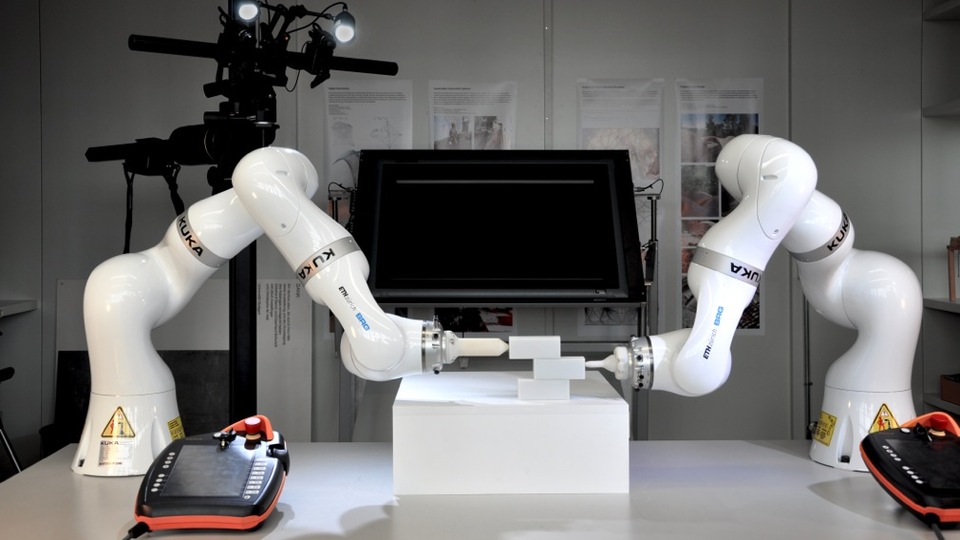
Previous research related to the physical modelling of the collapse of unreinforced masonry vaults has mainly focused on differential support displacements, tilting or dynamic loading on a shake table. In these cases, the results of the performed collapse tests were visually compared with numerical reference models. In this study, it is proposed to take into account not just the displacements of the blocks, but also the forces acting during the test, which are directly measured by the robotic arm. This provides additional information to compare the results with the computational simulations.